
 home > 소프트웨어 > Point Cloud 3D
home > 소프트웨어 > Point Cloud 3D
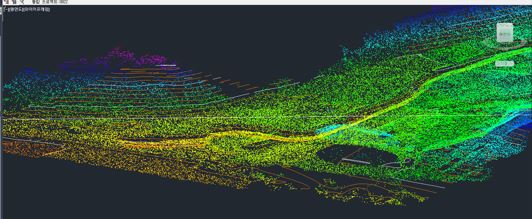
 국내 최초로 LIDAR 로 측량한 POINT CLOUD
형태인
LAS데이터 파일을
열어 등고선 생성하는 모듈을 개발하였습니다.
국내 최초로 LIDAR 로 측량한 POINT CLOUD
형태인
LAS데이터 파일을
열어 등고선 생성하는 모듈을 개발하였습니다.
국내 사용자들의 정확한 요구사항을 반영하여 빠르고 정확하게 데이터 처리가능하며 삼각망, 등고선, 표고점 생성이 가능합니다.

나모소프트에서
개발한 Point Cloud 3D 기능은
대용량 점구름
데이터도 빠르게 처리 가능하며 2D/3D 보기 기능으로 사용자가 직관적으로 데이터를 볼 수 있어 기존
드론
측량 성과품이나 기존 수치지도를 체크하거나 수정하기에 용이합니다.

점구름
데이터에서 단면을 생성하여 화면에 표출하고 표출단면에
대하여 거리/고도, 길이/ 경사값을
출력할 수 있습니다.

분리된 지표면에서 삼각망을 생성합니다.
불필요한 삼각망을 제거하여 좀더 정확한 등고선을 생성할 수 있습니다.

효율적인 등고선 생성을 위한 여러가지 기능을 제공합니다. 등고선
합치기 자르기 등의 기능을 제공하며 특히 요철값을
지정할 수 있어 울퉁불퉁한 등고선을 정리할 수 있습니다.
임의점
또는 원하는 영역의
표고점을 생성합니다. 표고점
고도 수정 기능과 소수자리 지정등의
기능을 제공합니다.





